Des pièces norelem pour utilisation dans les zones sinistrées
Le concours étudiant Robocop Rescue League consiste à tester différentes situations de crise dans lesquelles un robot de sauvetage autonome ou télécommandé est utilisé.
L’objectif de la Rescue League est de poser de nouveaux jalons dans le domaine du sauvetage en cas de catastrophe et de veiller à ce que les projets issus de la recherche académique soient encouragés dans le monde réel. Pour l’utilisation de nos éléments normalisés et de commande, cela signifie travailler de manière sûre et fiable dans des zones difficiles comme le gravier, les éboulis, les escaliers, les rampes ou même sur des terrains inaccessibles. C’est à cette compétition et à l’importance de la robotique pour la protection réelle contre les catastrophes que s’attaque l’équipe “Res.Q Bots”, composée d’étudiants de la FH Campus Wien. Les étudiants ont pour objectif de construire un robot capable de se déplacer avec un bras préhenseur – et ce, en utilisant nos pièces normalisées et nos éléments sur commande.

Les courroies dentées norelem ont été assemblées dans le robot pour la transmission de la force du couple du moteur aux arbres. Il s’agissait d’obtenir une transmission de force concluante et fiable, transmettant l’énergie à l’arbre avec le moins de perte de force possible. Des butées à billes à simple effet norelem ont été utilisés pour le stockage des roues et pour garantir un bon comportement de roulement. Les anneaux élastique pour arbres norelem ont été utilisés pour empêcher le déplacement axial et pour fixer le palier à la construction.
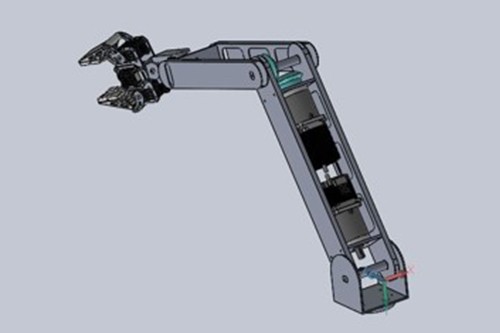
Un accouplement rigide a été installé dans le robot afin d’assurer une transmission élevée du couple, rigide en rotation et sans jeu. Cet accouplement rigide à fente est sans usure et sans entretien et convient donc à cette utilisation dans le robot. Les engrenages coniques norelem offrent des propriétés optimales pour la transmission de la force nécessaire au mouvement de l’articulation du robot qui ont été montées dans le bras articulé.